Incremental Encoder (Quadrature)
Converts shaft rotation into a pulse train — two channels (A and B) in quadrature give position and direction.
01 / Recognize it
What this sensor looks like
Learn the housing, active face, mounting, and connector before you meet it on a machine.
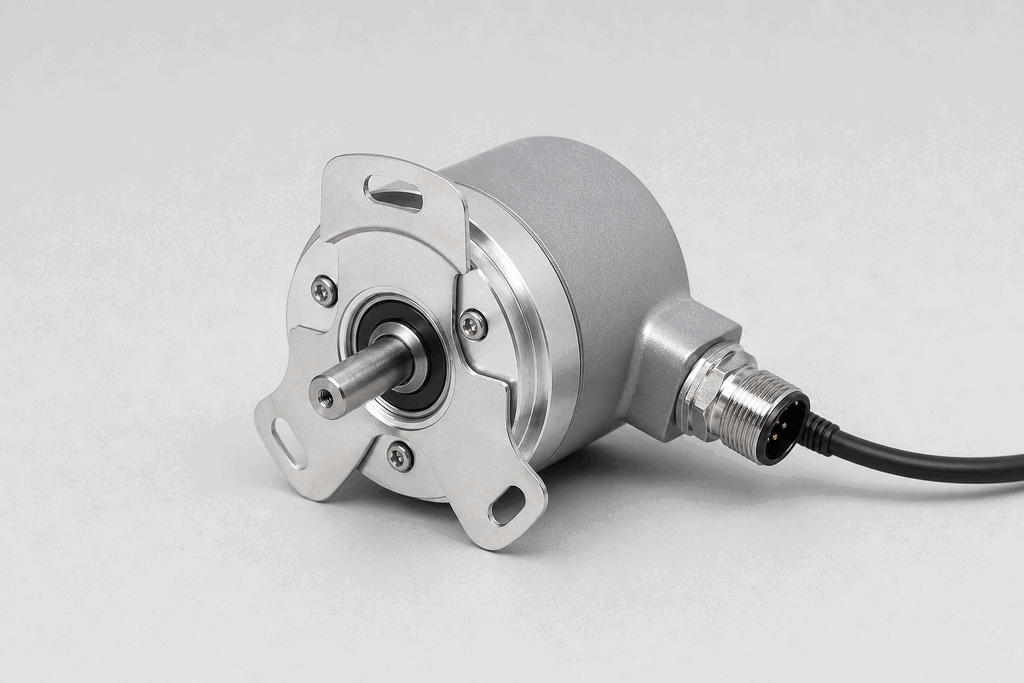
Hardware recognition
Know what to look for
Use the silhouette, active face, and connection style to identify the device before checking its part number and datasheet.
- Body and mounting
- A round metal housing mounts concentrically to a shaft or motor.
- Active face
- A solid shaft, hollow bore, or coupling transfers machine rotation.
- Cable and terminals
- A multi-core cable carries A, B, index, supply, and shield connections.
02 / Understand the principle
Watch cause become a PLC signal
Follow the physical event through the sensing element and into the exact controller value.
Signal story / live loop
Incremental Encoder (Quadrature): cause to controller
Now showingPhysical event
Shaft rotates → A/B pulses alternate → HSC0 = 1,800 rpm
03 / Test and commission it
Commission it on the bench
Move the process, adjust the setpoint, invert the logic and inject faults. Watch the PLC value respond immediately.
Commissioning bench
Incremental Encoder (Quadrature)
PLC channel
HSC0
RAW 9677
Engineering value
1050 rpm
Pulse frequency
Channel healthy
Signal is inside the expected operating range
Commissioning note: Verify PPR, quadrature mode, and direction before using counts for position.
Field guide
An incremental encoder generates a pulse each time the shaft rotates by a fixed angle. The number of pulses per revolution (PPR) — also called resolution or line count — determines how finely position can be measured. A 1000 PPR encoder generates 1000 complete A-B cycles per shaft revolution.
Quadrature encoders have two output channels, A and B, shifted 90 degrees apart in phase. By examining which channel leads the other, the PLC can determine direction of rotation: if A leads B, the shaft is rotating forward; if B leads A, it is rotating backward. With quadrature decoding (counting both edges of A and B), the effective resolution is multiplied by four.
The Z channel (index pulse) produces one pulse per revolution at a fixed reference position. This allows the controller to re-home the axis after power-up without returning to a physical limit switch.
PLC high-speed counter (HSC) modules process encoder signals directly in hardware, decoding the quadrature and accumulating the count at speeds up to several MHz — far faster than the PLC scan cycle could handle in software.
Common output types are HTL (push-pull, 10-30 V, suitable for long cable runs) and TTL (differential RS-422, fast, noise-immune). Always match the encoder output type to the HSC module's input specification.
Use this when…
- Measuring conveyor belt speed or position
- Providing axis position feedback to a servo drive or PLC motion module
- Counting print head rotations on a labelling machine
Where you will see it
Pick-and-place robot
Encoders on each servo axis stream position data to the motion controller, enabling precise multi-axis path following.
Palletiser conveyor
A line encoder on the main conveyor provides belt speed to the palletiser PLC, synchronising product pickup with belt motion.
Next skill
Connect it to PLC logic
Unlock PLC integration challenges