Online 6-Axis Robot Arm Simulator — Free in Your Browser
Program a UR-style industrial robot arm with real URScript, run pick-and-place under live physics, and learn jogging, waypoints, payload, and cobot safety — all in a browser tab. No install. No robot. No vendor license. Start free, then go Pro for the full graded course and certificate.
Free basic play, no card needed. Pro unlocks the full graded curriculum and certificate.
What it is
A virtual robot arm simulator you run online, free
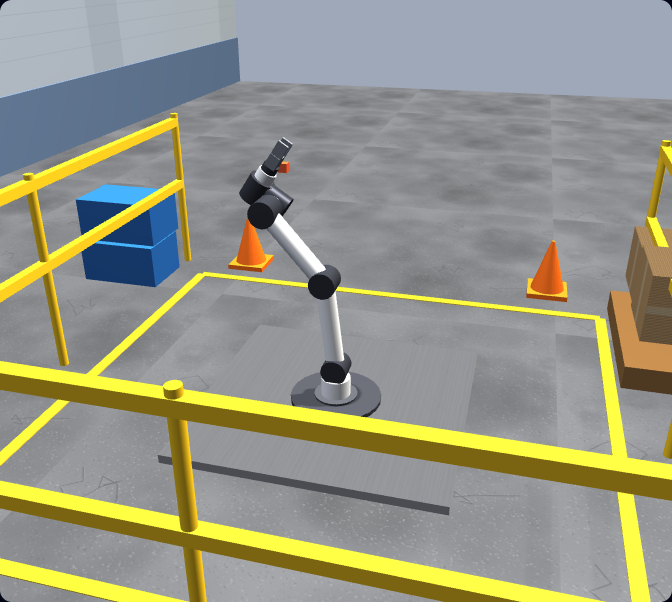
This is an online robot arm simulator: a 3D, UR-style six-axis articulated arm that you program with real URScript and watch run — without owning the robot, installing heavyweight offline software, or risking a real machine while you learn. You write the motion, the simulator solves the inverse kinematics and physics, and the arm does exactly what your program tells it to.
The arm has a gripper, the table has parts, and everything runs together in a single browser tab — the URScript interpreter, the six-axis kinematics, the rigid-body physics, and the work cell. You can jog the arm, build a full pick-and-place cycle, and have your program graded against a real goal. It is the same approach that made our PLC simulator work: practise the real skill, online, free to start.
Important
An industrial robot arm simulator, not a game
Search for “robot simulator” and most results are games — sandbox builders, Roblox experiences, fantasy robots. This is not that. This is an industrial and educational robot arm simulator for people learning to program real automation.
You program a realistic Universal Robots style six-axis arm in real URScript, and your programs are graded against engineering goals: place the part within tolerance, finish under the cycle-time budget, move without a collision, and stay within the collaborative-robot force limit. There is no make-believe and no toy physics — the skills you build here are the skills used to program robots on a real production line.
How it works
Jog, write URScript, run, grade
Jog the arm
Move the six-axis arm in joint space (rotate each axis) and in Cartesian / TCP space (drive the tool point in X, Y, Z). Jogging teaches you base vs tool frames and exactly where the tool centre point sits before you write a line of code.
Write real URScript
Type actual UR commands in the editor — movej for fast joint moves, movel for straight Cartesian lines, set_digital_out and gripper control, plus waypoints, variables, and loops. The interpreter understands the real language, not a simplified stand-in.
Run it under physics
The simulator solves the inverse kinematics for each target pose, plans the joint trajectory, and runs it under rigid-body physics. Grasp a part and it follows the gripper; collide with the table or exceed a safe contact force and that is detected and surfaced.
Get a graded result
Each task defines success — part placed at B within tolerance, no collision, under the cycle-time budget, within the cobot force limit. Your program runs, is checked against those goals, and you get specific feedback on what to fix. That goal-based grading is what turns watching into learning.
What you can simulate
From a first move to a full pick-and-place cell
The 6-axis robot arm simulator models the things that actually matter when you program a real cobot cell — not just pretty motion.
Pick-and-place
The core skill: approach, grasp, lift, traverse, place, release — the backbone of real cobot work, built from movej and movel moves.
Waypoints & paths
Chain waypoints into a path and tune speed and acceleration so the arm flows smoothly through a sequence instead of stopping at every point.
Payload
Set the payload the gripper is carrying and see how mass changes the safe speed and the way the arm tracks its trajectory.
Collisions
The physics detects when the arm or the part hits the table, a fixture, or itself — so you learn to plan approach and retract heights that clear the cell.
Protective stop (cobot safety)
Exceed a safe contact force and the simulated arm triggers a protective stop, just like a real collaborative robot — teaching the safety habits cobot work demands.
Gripper & digital I/O
Open and close the gripper with set_digital_out, read and set signals, and actually pick something up rather than just waving the tool around.
movej and movel moves.set_digital_out — a digital output closes the fingers to grasp and opens them to release.Real code
You write the same URScript a real arm runs
No drag-blocks-only toy and no invented pseudo-language. A first pick-and-place program in the simulator looks like this — and the exact same commands run on a physical Universal Robots controller:
# Pick a part at A, place it at B
set_tcp(p[0,0,0.15,0,0,0]) # tool centre point: 150 mm gripper
set_payload(0.8) # 0.8 kg part in the gripper
movej(home_q, a=1.4, v=1.0) # joint move to a safe home pose
movel(pick_approach, a=1.2, v=0.3) # linear move above the pick
movel(pick, a=0.5, v=0.1) # straight down onto the part
set_digital_out(0, True) # close gripper
sleep(0.4)
movel(pick_approach, a=1.2, v=0.3) # lift straight up
movel(place, a=1.2, v=0.25) # linear move to place B
set_digital_out(0, False) # open gripper
movej(home_q, a=1.4, v=1.0) # return homeThe simulator parses this, solves the inverse kinematics for each target pose, plans the joint trajectory, and runs it under physics. movej moves fast through joint space; movel keeps the tool on a straight Cartesian line — the distinction every robot arm programmer has to learn, shown live.
movej curves fast through joint space; movel holds a straight Cartesian line.Why it works
Why an online arm simulator is the best way to learn
vs a real robot arm
A six-axis arm costs tens of thousands and one wrong move can damage it or the cell. The simulator lets you fail safely and repeat a task a hundred times — the only way to actually build skill — at zero risk and zero cost.
vs heavyweight desktop sims
Official offline simulators are capable but often ship as a Linux virtual machine or a paid desktop install that beginners struggle to set up. Ours opens in a browser tab on any computer, with lessons that teach from zero.
vs robot games
The robot games filling app stores teach nothing about automation. This is a real industrial arm in real URScript with engineering-grade grading — so your practice turns into job-ready robot programming skill.
Pricing
Free to play, Pro for the full course
The basic arm simulator is free — open it in your browser and program a 6-axis arm with no card needed. A Pro subscription unlocks the full graded robot programming course and a certificate when you complete it. Start free, upgrade only if you want the structured curriculum and the credential.
Keep exploring
More robot programming resources
- Robot programming course — the full graded curriculum from your first jog to a palletising capstone.
- Robot simulator — the overview of our browser-based robotics simulator and how it teaches.
- Universal Robots simulator — a closer look at simulating UR arms without URSim or a vendor license.
- Universal Robots programming — how UR arms are programmed, from PolyScope to scripts.
- What is URScript? — the language you write in the simulator, explained from scratch.
Robot arm simulator FAQ
Program a 6-axis robot arm in your browser.
No install. No robot. No vendor license. Real URScript, graded from zero — free to start.